Le fonctionnement robot : de la perception à l'action
L'essentiel à retenir : le fonctionnement d'un robot repose sur une boucle continue entre perception, traitement et action. Vos systèmes transforment les données sensorielles en signaux électriques pour piloter des actionneurs mécaniques avec précision. Cette synergie entre microcontrôleur et énergie, qu'elle soit électrique ou hydraulique, permet une autonomie décisionnelle capable de corriger chaque mouvement en quelques millisecondes seulement.
Découvrez les robots Korben
Un robot autonome chargé d’accueil, de ménage ou de logistique en location dès 499 €/mois,

Votre entreprise perd-elle un temps précieux à cause de processus manuels répétitifs alors que l’automatisation semble hors de portée ? Comprendre le fonctionnement d’un robot repose sur un cycle précis entre capteurs, microcontrôleurs et actionneurs pour transformer des données brutes en mouvements productifs. Maîtrisez dès maintenant ces interactions entre matériel et algorithmes afin d’intégrer des solutions autonomes performantes et sécurisées au sein de vos équipes.
Table of Contents
Les composants matériels au cœur du fonctionnement robot
Après avoir survolé l’utilité des machines, entrons dans le vif du sujet avec les pièces qui composent leur anatomie physique.
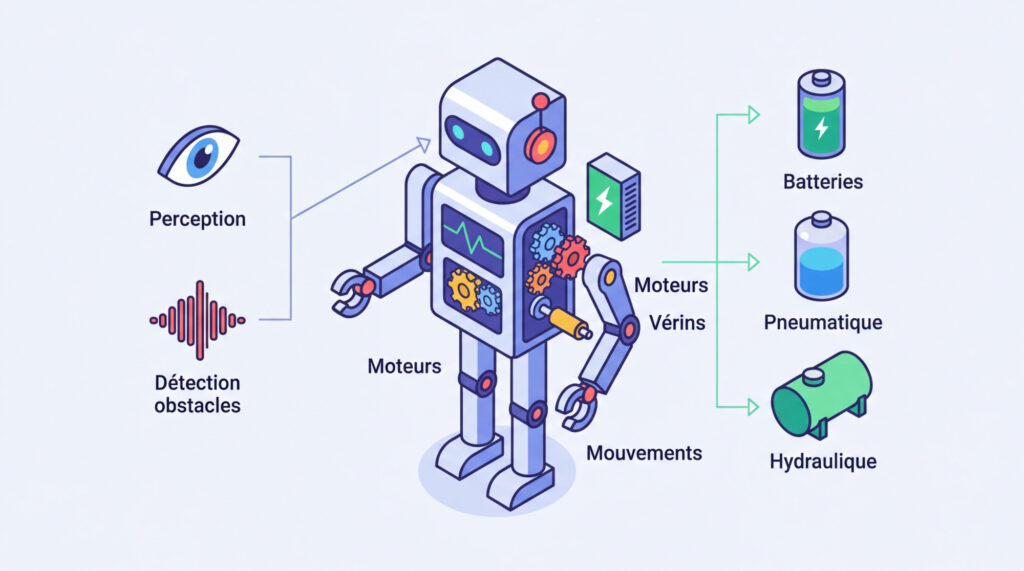
Les capteurs pour la perception de l'environnement
Considérez les capteurs comme les yeux et les oreilles de votre automate. Les caméras et les ultrasons détectent les obstacles proches. Ils assurent une interaction fluide avec le monde réel.
Ces outils convertissent les données physiques en signaux électriques. Les capteurs tactiles réagissent au contact direct. Votre système traduit alors ces pressions en informations exploitables par le processeur interne.
Mesurer les distances évite les collisions. C’est le pilier d’une navigation totalement sécurisée.
Les actionneurs pour la réalisation des mouvements
Les actionneurs sont les muscles de la machine. Les moteurs électriques ou les vérins transforment l’énergie reçue. Ils permettent ainsi au robot de se déplacer ou de saisir des objets.
La force mécanique provient directement de cette conversion énergétique. Chaque mouvement précis dépend de la puissance envoyée aux moteurs.
L’actionneur exécute une tâche concrète, comme soulever une charge ou visser. Le composant obéit simplement aux ordres reçus. C’est l’étape finale du mouvement physique de vos équipements.
Les sources d'énergie selon les besoins mécaniques
Comparez les batteries lithium aux systèmes pneumatiques. Le choix dépend de la puissance nécessaire. L’hydraulique reste privilégiée pour les efforts très lourds en milieu industriel.
L’autonomie visée dicte la taille de la batterie. Un robot mobile doit rester léger pour durer longtemps.
Voici les solutions courantes pour vos besoins :
- Batteries lithium pour la mobilité.
- Air comprimé pour la vitesse.
- Fluides hydrauliques pour la force brute.
L'unité de contrôle pour piloter la logique interne
Mais posséder des muscles et des sens ne suffit pas sans une intelligence pour coordonner l’ensemble.
Le microcontrôleur comme centre de traitement des données
L’ordinateur embarqué agit comme le cerveau central du système. Il reçoit les flux des capteurs en continu. Sa vitesse de calcul détermine la réactivité globale du robot.
Le processeur trie ensuite les informations sensorielles reçues. Il élimine les bruits inutiles pour ne garder que les données pertinentes. Enfin, il génère des commandes précises pour les membres.
Le code dicte chaque impulsion électrique. C’est ici que la décision prend vie.
L'intégration des algorithmes d'intelligence artificielle
Les réseaux de neurones facilitent la reconnaissance d’objets complexes. L’IA permet d’identifier un humain ou un meuble. Elle apporte une souplesse indispensable face à l’imprévu.
L’apprentissage machine diffère du calcul binaire classique. Le robot s’améliore en observant ses erreurs passées.
Sachez que certains modèles avancés utilisent ces technologies de pointe. Ces algorithmes de Deep Learning transforment radicalement la perception de votre environnement par la machine.
La boucle de rétroaction pour l'ajustement du comportement
Le retour d’information fonctionne comme un correcteur d’erreurs permanent. Le robot vérifie si son bras est bien placé. Il ajuste la trajectoire en temps réel.
Un capteur de pression indique si l’objet saisi glisse. Le système augmente alors immédiatement la puissance de serrage. Cette boucle garantit la précision des gestes les plus délicats.
La boucle de rétroaction est le secret de la précision robotique, permettant de corriger chaque mouvement en quelques millisecondes seulement.
Différences entre systèmes autonomes et semi-autonomes
Le robot semi-autonome attend une validation humaine pour valider ses trajectoires. À l’inverse, l’unité autonome prend ses propres décisions de navigation sans intervention. Les machines téléopérées restent, elles, sous contrôle permanent.
La complexité de l’environnement dicte souvent le niveau d’indépendance requis. Les critères de classification technique reposent sur cette capacité d’adaptation.
Pour vos équipes, intégrer un exemple de robot d’accueil autonome illustre parfaitement cette liberté de mouvement. Ces unités intelligentes gèrent seules les interactions sociales et les déplacements fluides.
Découvrez le robot serveur en restaurant Korben
on compare votre scénario “achat 8–21 k€” vs location dès 499 €/mois, et vous repartez avec une recommandation claire (modèle, parcours, cadence, ROI).
Le cycle séquentiel entre perception et action
Le cycle commence par la capture de données brutes via les capteurs. Ensuite, le système traite ces signaux pour décider de la meilleure option disponible. Cette analyse transforme l’environnement en informations logiques.
Le robot ne s’arrête jamais de calculer pour ajuster sa trajectoire. Chaque seconde, il réévalue sa position et son but final. La conversion du code en mouvement devient alors totalement fluide. Cette boucle garantit une réaction immédiate.
C’est ce rythme incessant qui donne l’illusion de la vie mécanique. Votre machine devient alors véritablement réactive.
La gestion de l'équilibre et des trajectoires mobiles
Les gyroscopes détectent instantanément l’inclinaison du corps pour maintenir la stabilité. Des micro-ajustements permanents empêchent la chute lors de la marche. Les robots bipèdes imitent ainsi la souplesse humaine.
Le robot cartographie la pièce pour trouver le chemin libre le plus efficace. Il calcule ses trajectoires en trois dimensions pour éviter tout obstacle imprévu.
| Technologie | Usage principal | Avantage |
|---|---|---|
| LiDAR | Cartographie laser | Précision des distances |
| SLAM | Localisation simultanée | Navigation en zone inconnue |
| Gyroscopes | Équilibre | Stabilité du mouvement |
Mise en œuvre pratique et responsabilités techniques
Au-delà de la théorie, ces machines transforment notre quotidien tout en soulevant de nouvelles interrogations.
Domaines d'usage dans l'industrie et le quotidien
Les applications médicales et industrielles se multiplient partout. Les bras articulés assemblent les voitures avec précision. En chirurgie, ils assistent les médecins pour des gestes minutieux.
Ces petits robots simplifient les corvées ménagères de manière invisible. Les aspirateurs autonomes illustrent parfaitement cette aide domestique efficace.
Voici les secteurs où leur présence est devenue indispensable :
- Maintenance industrielle
- Chirurgie de précision
- Logistique en entrepôt
- Nettoyage domestique automatisé
Défis de la programmation par apprentissage
Guider manuellement le robot est parfois plus efficace que le code pur. Le système s’adapte alors aux gestes de l’expert. Cette méthode facilite le transfert de compétences complexes.
Un changement de lumière peut perturber les capteurs. Les mises à jour logicielles corrigent ces failles régulièrement. La flexibilité reste le défi majeur. Le monde réel est imprévisible.
Apprendre à une machine demande de la patience et beaucoup de données de qualité.
Enjeux de sécurité et d'éthique en robotique
La protection physique des utilisateurs guide chaque conception. Les capteurs de proximité stoppent la machine instantanément. La sécurité est la priorité absolue des constructeurs mondiaux.
Qui est coupable en cas d’accident imprévu ? C’est un débat actuel intense. La responsabilité légale des actions autonomes reste complexe à définir.
La sécurité des robots collaboratifs repose sur des normes strictes qui garantissent une cohabitation sans danger entre l’homme et la machine.
Maîtriser le fonctionnement robot repose sur l’harmonie entre capteurs sensoriels, microcontrôleurs intelligents et actionneurs mécaniques. Intégrez dès maintenant ces technologies pour automatiser vos processus et gagner en précision. Propulsez votre structure vers l’efficacité de demain : l’ère de la collaboration homme-machine est déjà une réalité opérationnelle.
Testez-nous gratuitement !
Essayez les robots Korben adaptés à votre usage pendant quelques jours.
FAQ
Comment définiriez-vous concrètement le fonctionnement d'un robot ?
Un robot est un système alimenté en énergie qui interagit avec son environnement grâce à une structure articulée autour de trois phases cycliques : la perception, le traitement et l’action. Ce cycle continu permet à la machine de capter des données, de les analyser via un microcontrôleur et d’exécuter des mouvements physiques précis.
Pour vos projets, retenez que cette efficacité repose sur l’harmonie entre le « cerveau » (le programme informatique), les « sens » (les capteurs) et les « muscles » (les actionneurs). C’est cette boucle de décision constante qui offre à l’automate son autonomie et sa capacité à réaliser des tâches complexes.
Quels sont les différents types d'actionneurs utilisés pour créer du mouvement ?
Les actionneurs sont les composants qui transforment l’énergie en force mécanique. On distingue principalement les modèles électriques, appréciés pour leur précision et leur propreté, les modèles hydrauliques, indispensables pour déployer des forces colossales, et les modèles pneumatiques, reconnus pour leur rapidité d’exécution.
Le choix de ces « muscles » dépendra directement de vos besoins opérationnels : un robot de chirurgie privilégiera la finesse de l’électrique, tandis qu’une machine de chantier exploitera la puissance brute de l’hydraulique. Il existe également des technologies spécifiques comme les actionneurs piézoélectriques pour un positionnement nanométrique.
Comment les capteurs permettent-ils à une machine de percevoir son environnement ?
Les capteurs agissent comme les organes sensoriels du robot en convertissant des grandeurs physiques, telles que la pression ou la distance, en signaux électriques exploitables. Grâce à des technologies variées comme les capteurs optiques, capacitifs ou ultrasons, la machine peut « voir » des obstacles ou mesurer la force de sa propre manipulation.
Cette conversion est cruciale pour la sécurité de vos installations. Par exemple, des capteurs de force multiaxiaux permettent à un bras robotique de ressentir une résistance, garantissant ainsi une interaction délicate et précise avec des objets fragiles ou des collaborateurs humains.
Qu'est-ce qu'une boucle de rétroaction et pourquoi est-elle essentielle ?
La boucle de rétroaction est un mécanisme d’autorégulation où le robot utilise les résultats de ses actions pour corriger son comportement en temps réel. Dans une boucle négative, la plus courante, le système compare la position réelle de ses membres à la position cible et ajuste instantanément la puissance des moteurs pour réduire l’écart.
Ce processus garantit la stabilité et la précision de vos équipements. Qu’il s’agisse de maintenir une vitesse constante malgré la friction ou d’ajuster une trajectoire pour éviter un obstacle imprévu, la rétroaction est le secret d’une performance robotique fiable et sécurisée.
Quelles sont les principales applications de la robotique aujourd'hui ?
La robotique s’étend désormais à presque tous les secteurs d’activité pour optimiser la productivité et la sécurité. On la retrouve massivement dans l’industrie pour les tâches répétitives, dans le milieu médical pour assister les chirurgiens, ou encore dans la logistique pour la gestion automatisée des entrepôts.
Au quotidien, elle simplifie également vos corvées via la robotique domestique (aspirateurs autonomes) et améliore la sécurité publique grâce à des unités d’intervention spécialisées. Cette diversité démontre que la technologie robotique est un levier de croissance incontournable pour les infrastructures modernes.
Prenez rendez-vous avec notre expert
Vous avez besoin de renseignements ? Vous souhaitez tester gratuitement nos robots ? Laissez nous vos coordonnés et Sylvain, notre expert vous rappellera sous 24 heures.

Sylvain Ballario
Directeur du développement commercial
