Robot Operation: From Perception to Action
The key takeaway: a robot's operation relies on a continuous loop between perception, processing, and action. Your systems transform sensory data into electrical signals to precisely control mechanical actuators. This synergy between microcontrollers and energy, whether electrical or hydraulic, enables decision-making autonomy capable of correcting each movement in just milliseconds.
Discover Korben robots
An autonomous robot for reception, cleaning, or logistics Rental starting from €499/month,

Is your company wasting valuable time on repetitive manual processes, while automation seems out of reach? Understanding how a robot works relies on a precise cycle between sensors, microcontrollers, and actuators to transform raw data into productive movements. Master these interactions between hardware and algorithms now to integrate high-performing and secure autonomous solutions within your teams.
Table of Contents
Hardware components at the heart of robot operation
After a quick overview of the usefulness of machines, let's get to the heart of the matter with the parts that make up their physical anatomy.
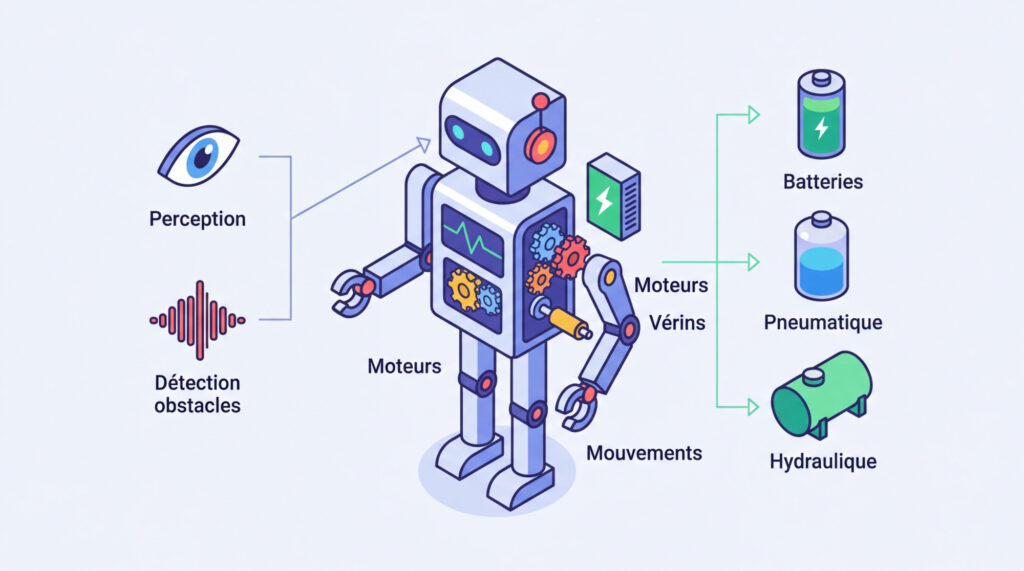
Sensors for environmental perception
Consider sensors the eyes and ears of your robot. Cameras and ultrasound detect nearby obstacles. They ensure smooth interaction with the real world.
These tools convert physical data into electrical signals. Tactile sensors react to direct contact. Your system then translates these pressures into information that can be processed by the internal processor.
Measuring distances prevents collisions. It is the cornerstone of completely safe navigation.
Actuators for movements
Actuators are the muscles of the machine. Electric motors or cylinders transform the received energy. They thus allow the robot to move or grasp objects.
Mechanical force directly comes from this energy conversion. Every precise movement depends on the power sent to the motors.
The actuator performs a concrete task, such as lifting a load or screwing. The component simply obeys the commands it receives. This is the final stage in the physical movement of your equipment.
Energy sources according to mechanical needs
Compare lithium batteries with pneumatic systems. The choice depends on the required power. Hydraulics remain preferred for very heavy loads in industrial environments.
The desired autonomy dictates the battery size. A mobile robot must remain lightweight to last a long time.
Here are some common solutions for your needs:
- Lithium batteries for mobility.
- Compressed air for speed.
- Hydraulic fluids for brute force.
The control unit to drive the internal logic
But possessing muscles and senses is not enough without intelligence to coordinate them all.
The microcontroller as a data processing center
The embedded computer acts as the central brain of the system. It receives continuous streams from the sensors. Its processing speed determines the overall responsiveness of the robot.
The processor then sorts the sensory information received. It eliminates unnecessary noise to retain only relevant data. Finally, it generates precise commands for the limbs.
The code dictates every electrical pulse. This is where the decision comes to life.
Integrating artificial intelligence algorithms
Neural networks facilitate the recognition of complex objects. AI makes it possible to identify a human or a piece of furniture. It provides essential flexibility in the face of the unexpected.
Machine learning differs from classical binary computation. The robot improves by observing its past mistakes.
Know that Some advanced models use these technologies algorithms. These Deep Learning algorithms radically transform the machine's perception of your environment.
The feedback loop for behavior adjustment
The feedback functions as a permanent error corrector. The robot checks whether its arm is correctly positioned. It adjusts the trajectory in real time.
A pressure sensor indicates if the gripped object is slipping. The system then immediately increases the clamping force. This loop guarantees the precision of even the most delicate movements.
The feedback loop is the secret to robotic precision, enabling the correction of every movement in just milliseconds.
Differences between autonomous and semi-autonomous systems
The semi-autonomous robot awaits human validation to confirm its trajectories. In contrast, the autonomous unit makes its own navigation decisions without intervention. Teleoperated machines, on the other hand, remain under constant control.
The complexity of the environment often dictates the level of independence required. Technical classification criteria are based on this adaptability.
For your teams, integrating a example of an autonomous home robot perfectly illustrates this freedom of movement. These intelligent units independently manage social interactions and fluid movements.
Discover the Korben restaurant serving robot
let's compare your scenario “purchase 8–21 k€” vs Rental starting from €499/month, and you leave with a clear recommendation (model, path, cadence, ROI).
The sequential cycle between perception and action
The cycle begins by capturing raw data from the sensors. The system then processes these signals to decide on the best available option. This analysis transforms the environment into logical information.
The robot never stops calculating to adjust its trajectory. Every second, it reevaluates its position and its final goal. The conversion of code into movement then becomes completely fluid. This loop guarantees an immediate reaction.
It is this relentless pace that gives the illusion of mechanical life. Your machine then becomes truly reactive.
Management of balance and mobile trajectories
Gyroscopes instantly detect body tilt to maintain stability. Constant micro-adjustments prevent falling while walking. Bipedal robots thus mimic human flexibility.
The robot maps the room to find the most efficient clear path. It calculates its trajectories in three dimensions to avoid any unforeseen obstacles.
| Technology | Main use | Advantage |
|---|---|---|
| LiDAR | Laser mapping | Distance accuracy |
| SLAM | Simultaneous localization | Navigation in unknown territory |
| Gyroscopes | Balance | Stability of movement |
Practical implementation and technical responsibilities
Beyond theory, these machines are transforming our daily lives while raising new questions.
Fields of use in industry and daily life
Medical and industrial applications are multiplying everywhere. Articulated arms assemble cars with precision. In surgery, they assist doctors with delicate procedures.
These little robots invisibly simplify household chores. Robotic vacuum cleaners perfectly illustrate this effective domestic help.
Here are the sectors where their presence has become indispensable:
- Industrial Maintenance
- Precision surgery
- Warehouse logistics
- Automated domestic cleaning
Challenges of machine learning programming
Manually guiding the robot is sometimes more effective than pure code. The system then adapts to the expert's gestures. This method facilitates the transfer of complex skills.
A change in light can disrupt the sensors. Software updates regularly fix these flaws. Flexibility remains the major challenge. The real world is unpredictable.
Teaching a machine requires patience and a lot of quality data.
Security and ethical challenges in robotics
User physical protection guides every design. Proximity sensors stop the machine instantly. Safety is the top priority for global manufacturers.
Who is liable in the event of an unforeseen accident? This is an intense current debate. The legal responsibility for autonomous actions remains complex to define.
The safety of collaborative robots relies on strict standards that ensure safe coexistence between humans and machines.
Mastering robot operation relies on the harmony between sensory sensors, intelligent microcontrollers and mechanical actuators. Integrate these technologies now to automate your processes and gain in precision. Propel your organization towards tomorrow's efficiency: the era of man-machine collaboration is already an operational reality.
Try us out for free!
Try out the Korben robots adapted to your needs for a few days.
FAQ
How would you concretely define how a robot works?
A robot is a power-driven system that interacts with its environment through a structure articulated around three cyclical phases: perception, processing, and action. This continuous cycle allows the machine to capture data, analyze it via a microcontroller, and execute precise physical movements.
For your projects, remember that this efficiency is based on the harmony between the «brain» (the computer program), the «senses» (the sensors) and the «muscles» (the actuators). It's this constant decision loop that gives the PLC its autonomy and ability to carry out complex tasks.
What are the different types of actuators used to create motion?
Actuators are the components that transform energy into mechanical force. They include electric actuators, appreciated for their precision and cleanliness; hydraulic actuators, indispensable for deploying colossal forces; and pneumatic actuators, renowned for their speed.
The choice of these «muscles» will directly depend on your operational needs: a surgical robot will favor the precision of electric motors, while a construction machine will utilize the brute power of hydraulics. There are also specific technologies like piezoelectric actuators for nanometric positioning.
How do sensors allow a machine to perceive its environment?
Sensors act as the robot's sensory organs, converting physical quantities like pressure or distance into usable electrical signals. Through various technologies such as optical, capacitive, or ultrasonic sensors, the machine can «see» obstacles or measure the force of its own manipulation.
This conversion is crucial for the safety of your facilities. For example, multi-axis force sensors allow a robotic arm to feel resistance, thus ensuring delicate and precise interaction with fragile objects or human collaborators.
What is a feedback loop and why is it essential?
The feedback loop is a self-regulation mechanism where the robot uses the results of its actions to correct its behavior in real-time. In a negative loop, the most common type, the system compares the actual position of its limbs to the target position and instantly adjusts motor power to reduce the difference.
This process ensures the stability and accuracy of your equipment. Whether it's maintaining a constant speed despite friction or adjusting a trajectory to avoid an unforeseen obstacle, feedback is the key to reliable and safe robotic performance.
The main applications of robotics today are in manufacturing, logistics, healthcare, agriculture, and exploration.
Robotics is now used in almost every sector of activity to optimize productivity and safety. It is used extensively in industry for repetitive tasks, in the medical sector to assist surgeons, and in logistics for automated warehouse management.
In daily life, it also simplifies your chores through domestic robotics (autonomous vacuum cleaners) and improves public safety with specialized intervention units. This diversity demonstrates that robotic technology is an essential growth lever for modern infrastructure.
Make an appointment with our expert
Do you need more information?Would you like to test our robots free of charge?Leave us your contact details and Sylvain, our expert, will call you back within 24 hours.

Sylvain Ballario
Business Development Director
