O funcionamento de um robô: da percepção à ação
O essencial a reter: o funcionamento de um robô baseia-se numa bucle contínua entre perceção, processamento e ação. Os seus sistemas transformam os dados sensoriais em sinais elétricos para controlar acionadores mecânicos com precisão. Esta sinergia entre microcontrolador e energia, seja elétrica ou hidráulica, permite uma autonomia decisória capaz de corrigir cada movimento em apenas alguns milissegundos.
Descubra os robôs Korben
Um robô autônomo encarregado de recepção, limpeza ou logística em aluguel a partir de € 499/mês,

Sua empresa está perdendo tempo precioso com processos manuais repetitivos, enquanto a automação parece fora de alcance? Compreender o funcionamento de um robô baseia-se em um ciclo preciso entre sensores, microcontroladores e atuadores para transformar dados brutos em movimentos produtivos. Domine agora essas interações entre hardware e algoritmos para integrar soluções autônomas de alta performance e segurança às suas equipes.
Índice
Os componentes de hardware no cerne do funcionamento robótico
Depois de sobrevoarmos a utilidade das máquinas, vamos ao que interessa com as peças que compõem sua anatomia física.
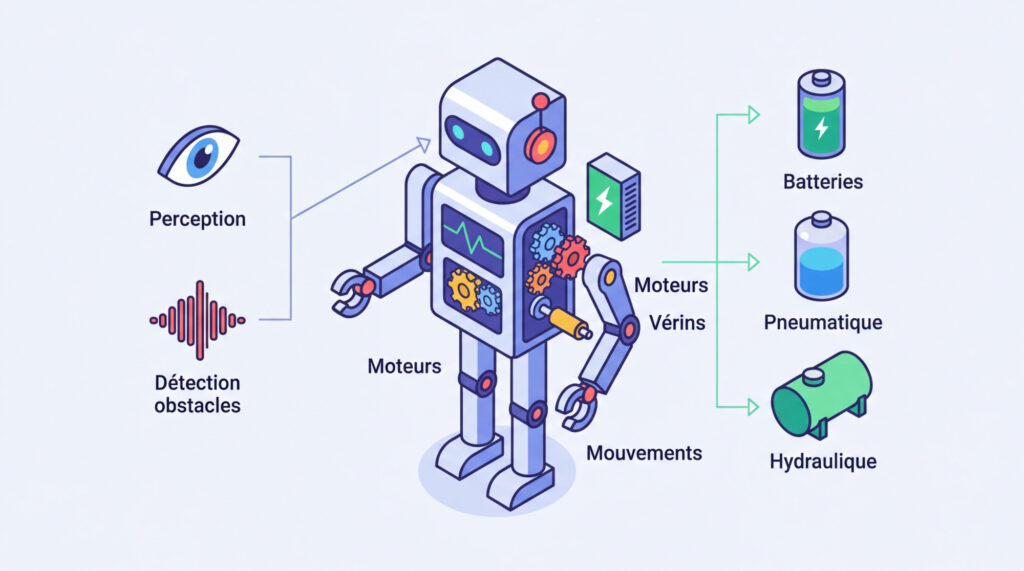
Sensores para a percepção do ambiente
Considere os sensores como os olhos e ouvidos do seu robô. Câmeras e ultrassom detectam obstáculos próximos. Eles garantem uma interação fluida com o mundo real.
Essas ferramentas convertem dados físicos em sinais elétricos. Os sensores táteis reagem ao contato direto. Seu sistema, então, traduz essas pressões em informações utilizáveis pelo processador interno.
Medir distâncias evita colisões. É o pilar de uma navegação totalmente segura.
Os atuadores para a realização de movimentos
Os atuadores são os músculos da máquina. Motores elétricos ou cilindros transformam a energia recebida. Eles permitem que o robô se mova ou pegue objetos.
A força mecânica vem diretamente dessa conversão de energia. Cada movimento preciso depende da potência enviada aos motores.
O atuador executa uma tarefa específica, como levantar uma carga ou parafusar. O componente simplesmente obedece às ordens recebidas. Esta é a etapa final do movimento físico de seus equipamentos.
As fontes de energia segundo as necessidades mecânicas
Compare as baterias de lítio com os sistemas pneumáticos. A escolha depende da potência necessária. A hidráulica continua sendo a preferida para esforços muito pesados em ambientes industriais.
A autonomia desejada dita o tamanho da bateria. Um robô móvel precisa se manter leve para durar muito tempo.
Aqui estão as soluções comuns para suas necessidades:
- Baterias de lítio para mobilidade.
- Ar comprimido para velocidade.
- Fluidos hidráulicos para força bruta.
A unidade de controle para pilotar a lógica interna
Mas possuir músculos e sentidos não é suficiente sem uma inteligência para coordenar o conjunto.
O microcontrolador como centro de processamento de dados
O computador de bordo atua como o cérebro central do sistema. Ele recebe os flux dos sensores continuamente. Sua velocidade de cálculo determina a reatividade geral do robô.
O processador então classifica as informações sensoriais recebidas. Ele elimina ruídos desnecessários para manter apenas os dados relevantes. Finalmente, ele gera comandos precisos para os membros.
O código dita cada impulso elétrico. É aqui que a decisão ganha vida.
A integração dos algoritmos de inteligência artificial
As redes neurais facilitam o reconhecimento de objetos complexos. A IA permite identificar um humano ou um móvel. Ela traz uma flexibilidade indispensável diante do imprevisto.
O aprendizado de máquina difere da computação binária clássica. O robô melhora observando seus erros passados.
Saiba que certos modelos avançados utilizam essas tecnologias de ponta. Esses algoritmos de Deep Learning estão transformando radicalmente a percepção que a máquina tem do seu ambiente.
O ciclo de feedback para o ajuste do comportamento
O feedback funciona como um corretor de erros permanente. O robô verifica se seu braço está bem posicionado. Ele ajusta a trajetória em tempo real.
Um sensor de pressão indica se o objeto agarrado está deslizando. O sistema aumenta então imediatamente a força de aperto. Este ciclo garante a precisão dos movimentos mais delicados.
A malha de feedback é o segredo da precisão robótica, permitindo corrigir cada movimento em apenas alguns milissegundos.
Diferenças entre sistemas autônomos e semi-autônomos
O robô semi-autônomo espera uma validação humana para confirmar suas trajetórias. Por outro lado, a unidade autônoma toma suas próprias decisões de navegação sem intervenção. Já as máquinas teleoperadas permanecem sob controle permanente.
A complexidade do ambiente muitas vezes dita o nível de independência exigido. Os critérios de classificação técnica baseiam-se nessa capacidade de adaptação.
Para suas equipes, integrar um Exemplo de robô de recepção autônomo ilustram perfeitamente essa liberdade de movimento. Estas unidades inteligentes gerenciam sozinhas as interações sociais e os deslocamentos fluidos.
Descubra o robô garçom do restaurante Korben
Comparamos seu cenário de “compra de 8 a 21 mil euros” com o cenário de "compra de 8 a 21 mil euros". aluguel a partir de € 499/mês, e você sai com uma recomendação clara (modelo, caminho, taxa, ROI).
O ciclo sequencial entre percepção e ação
O ciclo começa com a captura de dados brutos por meio dos sensores. Em seguida, o sistema processa esses sinais para decidir a melhor opção disponível. Essa análise transforma o ambiente em informações lógicas.
O robô nunca para de calcular para ajustar sua trajetória. A cada segundo, ele reavalia sua posição e seu objetivo final. A conversão do código em movimento torna-se então totalmente fluida. Esse loop garante uma reação imediata.
É esse ritmo incessante que dá a ilusão da vida mecânica. Sua máquina se torna então verdadeiramente reativa.
Gerenciamento de equilíbrio e trajetórias móveis
Os giroscópios detectam instantaneamente a inclinação do corpo para manter a estabilidade. Micropontos permanentes evitam quedas ao caminhar. Robôs bípedes imitam assim a flexibilidade humana.
O robô mapeia a sala para encontrar o caminho livre mais eficiente. Ele calcula suas trajetórias em três dimensões para evitar quaisquer obstáculos imprevistos.
| Tecnologia | Uso principal | Vantagem |
|---|---|---|
| LiDAR | Mapeamento a laser | Precisão de distâncias |
| SLAM | Localização simultânea | Navegação em zona desconhecida |
| Giroscópios | Equilíbrio | Estabilidade do movimento |
Implementação prática e responsabilidades técnicas
Além da teoria, essas máquinas transformam nosso cotidiano ao mesmo tempo em que levantam novos questionamentos.
Domínios de uso na indústria e no cotidiano
As aplicações médicas e industriais se multiplicam por toda parte. Braços articulados montam carros com precisão. Na cirurgia, eles auxiliam os médicos em gestos minuciosos.
Esses robôs pequenos simplificam as tarefas domésticas de forma invisível. Os aspiradores autônomos ilustram perfeitamente essa ajuda doméstica eficaz.
Aqui estão os setores onde sua presença se tornou indispensável:
- Manutenção industrial
- Cirurgia de precisão
- Logística de armazém
- Limpeza doméstica automatizada
Desafios da programação por aprendizado
Guiar o robô manualmente é às vezes mais eficaz do que programar. O sistema se adapta então aos gestos do especialista. Este método facilita a transferência de competências complexas.
Uma mudança de luz pode perturbar os sensores. As atualizações de software corrigem essas falhas regularmente. A flexibilidade continua sendo o principal desafio. O mundo real é imprevisível.
Ensinar uma máquina exige paciência e muitos dados de qualidade.
Desafios de segurança e ética em robótica
A proteção física dos usuários guia cada projeto. Sensores de proximidade param a máquina instantaneamente. A segurança é prioridade máxima dos fabricantes globais.
Quem é culpado em caso de acidente imprevisto? Este é um debate atual intenso. A responsabilidade legal das ações autônomas ainda é complexa de definir.
A segurança dos robôs colaborativos baseia-se em normas rigorosas que garantem uma convivência segura entre o homem e a máquina.
Dominar o funcionamento de robôs baseia-se na harmonia entre sensores, microcontroladores inteligentes e atuadores mecânicos. Integre estas tecnologias agora mesmo para automatizar seus processos e ganhar em precisão. Impulsione sua estrutura para a eficiência de amanhã: a era da colaboração homem-máquina já é uma realidade operacional.
Experimente-nos gratuitamente!
Experimente os robôs Korben adaptados para seu uso por alguns dias.
PERGUNTAS FREQUENTES
Como você descreveria concretamente o funcionamento de um robô?
Um robô é um sistema movido a energia que interage com seu ambiente por meio de uma estrutura articulada em três fases cíclicas: percepção, processamento e ação. Esse ciclo contínuo permite que a máquina capture dados, os analise por meio de um microcontrolador e execute movimentos físicos precisos.
Para os seus projetos, lembre-se que essa eficiência repousa na harmonia entre o «cérebro» (o programa de computador), os «sentidos» (os sensores) e os «músculos» (os atuadores). É esse ciclo de decisão constante que confere ao autômato sua autonomia e sua capacidade de realizar tarefas complexas.
Quais são os diferentes tipos de atuadores utilizados para criar movimento?
Os atuadores são os componentes que transformam energia em força mecânica. Distinguem-se principalmente os modelos elétricos, apreciados pela sua precisão e limpeza, os modelos hidráulicos, indispensáveis para desenvolver forças colossais, e os modelos pneumáticos, reconhecidos pela sua rapidez de execução.
A escolha desses «músculos» dependerá diretamente de suas necessidades operacionais: um robô de cirurgia privilegiará a fineza do elétrico, enquanto uma máquina de construção explorará a potência bruta do hidráulico. Existem também tecnologias específicas como os atuadores piezoelétricos para posicionamento nanométrica.
Como os sensores permitem que uma máquina perceba seu ambiente?
Os sensores agem como os órgãos sensoriais do robô, convertendo grandezas físicas, como pressão ou distância, em sinais elétricos utilizáveis. Através de tecnologias variadas, como sensores ópticos, capacitivos ou ultrassônicos, a máquina consegue «ver» obstáculos ou medir a força de sua própria manipulação.
Esta conversão é crucial para a segurança das suas instalações. Por exemplo, sensores de força multiaxiais permitem que um braço robótico sinta resistência, garantindo assim uma interação delicada e precisa com objetos frágeis ou com colaboradores humanos.
O que é um loop de feedback e por que ele é essencial?
A malha de feedback é um mecanismo de autorregulação onde o robô usa os resultados de suas ações para corrigir seu comportamento em tempo real. Em uma malha negativa, a mais comum, o sistema compara a posição real de seus membros com a posição alvo e ajusta instantaneamente a potência dos motores para reduzir o desvio.
Esse processo garante a estabilidade e a precisão dos seus equipamentos. Seja para manter uma velocidade constante apesar do atrito ou para ajustar uma trajetória e desviar de um obstáculo inesperado, o feedback é o segredo para um desempenho robótico confiável e seguro.
Quais são as principais aplicações da robótica hoje em dia?
A robótica agora se estende a quase todos os setores de atividade para otimizar a produtividade e a segurança. Ela é encontrada massivamente na indústria para tarefas repetitivas, no meio médico para auxiliar cirurgiões, ou ainda na logística para o gerenciamento automatizado de armazéns.
No dia a dia, ela também simplifica suas tarefas domésticas por meio da robótica doméstica (aspiradores autônomos) e melhora a segurança pública com unidades de intervenção especializadas. Essa diversidade demonstra que a tecnologia robótica é um impulsionador de crescimento indispensável para as infraestruturas modernas.
Marque uma consulta com nosso especialista
Você precisa de mais informações?Gostaria de testar nossos robôs gratuitamente?Deixe-nos seus dados e Sylvain, nosso especialista, entrará em contato com você em 24 horas.

Sylvain Ballario
Diretor de Desenvolvimento de Negócios
